Vector (física)
De Wikipedia, la enciclopedia libre
Un vector físico es una magnitud física caracterizable mediante un punto de aplicación u origen, una magnitud o módulo, una dirección y un sentido; o alternativamente por un número de componentes independientes tales que los componentes medidas por diferentes observadores sean relacionables de manera sistemática.
Existe la necesidad de explicar fenómenos físicos que no pueden ser descritos con un solo valor, es necesario definir las cuatro características mencionadas anteriormente:
- Punto de aplicación u origen.
- Magnitud o módulo: determina el tamaño del vector.
- Dirección: determina la recta en el espacio en que se ubica el vector.
- Sentido: determina hacia qué lado de la recta de acción apunta el vector.
Ejemplos
La distancia final entre dos coches que parten de un mismo sitio no puede quedar determinada únicamente por sus velocidades. Si éstas son 30 y- De
10 km , si los dos coches llevan la misma dirección y mismo sentido. - De
70 km , si salen en la misma dirección y sentidos contrarios. - De
50 km , si toman direcciones perpendiculares.
Representación gráfica

Representación gráfica de dos vectores deslizantes
Se representa como un segmento con dirección y sentido, dibujado como una "flecha". Su largo representa la magnitud, su pendiente la dirección y la "punta de flecha" indica su sentido.Notación
En física las variables escalares se representan con una letra: s, a, u, etc., y los vectores con una flecha encima:Componentes de un vector
Las coordenadas o componentes del vector en un sistema de referencia pueden escribirse entre paréntesis y separadas con comas:
Vectores como combinación lineal
Cualquier vector que se considere es siempre una combinación lineal de un número n de vectores unitarios perpendiculares entre sí, que forman la base del espacio vectorial en cuestión.Estos vectores unitarios se suelen llamar versores, y en el espacio tridimensional se representan por

si bien es también usual representarlos como
 siendo
siendo Tipos de vectores
Según los criterios que se utilicenara determinar la igualdad de dos vectores, pueden distinguirse distintos tipos de los mismos:- Vectores libres: no tienen su extremo inicial -u origen- fijado en ningún punto en particular.
- Vectores fijos: tienen su extremo inicial -u origen- fijado en algún punto en particular.
- Vectores equipolentes: son vectores que presentan iguales módulos, direcciones y sentidos.
- Vectores deslizantes: son vectores equipolentes que actúan sobre una misma recta.
- Vectores concurrentes: comparten el mismo extremo inicial -u origen-.
- Vectores unitarios: vectores de módulo igual a uno.
- Vectores opuestos: vectores de distinto sentido, pero igual magnitud y dirección (también vectores anti - paralelos)
- Vectores colineales: son aquellos que actúan en una misma línea de acción
Operaciones con vectores
Suma de vectores
Para sumar dos vectores libres vector y vector se escogen como representantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector.Suma de vectores

Método del paralelogramo
Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en los puntos, completando el resto del paralelogramo con las paralelas a cada uno (ver gráfico a la derecha). El resultado de la suma se obtiene partiendo del origen de ambos vectores. Este método es aplicado dentro de la existencia de 2 fuerzas las cuales tienen ángulo de separación entre las 2 de tal forma que al realizar la proyección o traslación de cada una de ellas formemos un cuadrilátero y que para esto es importante considerar que para la solución se deben emplear dos condiciones. El método matemático consiste en emplear un cálculo de la fuerza resultante la ley de los cósenos, la cual establece la apertura del ángulo entre la combinación de un triángulo de 90º y un triángulo mayor o menor de 90º.Método del triángulo
Consiste en disponer gráficamente un vector a continuación de otro, es decir, el extremo inicial del vector "b" coincide con el extremo final del vector "a". Luego se traza una diagonal que une el inicio del vector "a" con el resto de los extremos. si un vector es mayor o menor que otro se sumara para la satisfacción de los ángulos. El método del triángulo podrá, realizarse ,cuando el sistema esta constituido por dos componentes vectoriales. 1.- trazar los ejes de coordenadas 2.- se establece la escala gráfica o numérica, se representan las longitudes de los componentes incluyendo la resultante final. se traza la dirección del componente (A) con la inclinación determinada partiendo del (o).Método analítico
Producto de un vector por un escalar (número racional Q)
Producto por un escalar
Partiendo de la representación gráfica del vector, sobre la misma línea de su dirección tomamos tantas veces el módulo de vector como marque el escalar, que de ser negativo cambia el sentido (ver gráfico).Partiendo de un escalar




Suma de Vectores:

Resta de vectores
Para restar dos vectores libres U y V se suma U con el opuesto de V, esto es U - V = U + (-V).
Los componentes del vector resta se obtienen restando los componentes de los vectores.
Producto escalar
En matemática, el producto escalar, también conocido como producto interno, interior o punto (en inglés, dot product), es una operación definida sobre dos vectores de un espacio euclídeo cuyo resultado es un número o escalar. Esta operación permite explotar los conceptos de la geometría euclidiana tradicional: longitudes, ángulos, ortogonalidad en dos y tres dimensiones. El producto escalar puede definirse también en los espacios euclídeos de dimensión mayor a tres, y en general en los espacios vectoriales reales y complejos. Los espacios vectoriales dotados de producto escalar reciben el nombre de espacios prehilbertianos.
Un producto escalar se puede expresar como una aplicación donde V es un espacio vectorial y
donde V es un espacio vectorial y  es el cuerpo sobre el que está definido V.
es el cuerpo sobre el que está definido V.  debe satisfacer las siguientes condiciones:
debe satisfacer las siguientes condiciones:
 son vectores de V,
son vectores de V,  representan escalares del cuerpo y
representan escalares del cuerpo y  es el conjugado del complejo c.
es el conjugado del complejo c.
Si el cuerpo tiene parte imaginaria nula (v.g., ), la propiedad de ser sesquilineal se convierte en ser bilineal y el ser hermítica se convierte en ser simétrica.
), la propiedad de ser sesquilineal se convierte en ser bilineal y el ser hermítica se convierte en ser simétrica.
También suele representarse por o por
o por  .
.
Un espacio vectorial sobre el cuerpo o  dotado de un producto escalar se denomina espacio prehilbert o espacio prehilbertiano. Si además es completo, se dice que es un espacio de hilbert, y si la dimensión es finita, se dirá que es un espacio euclídeo.
dotado de un producto escalar se denomina espacio prehilbert o espacio prehilbertiano. Si además es completo, se dice que es un espacio de hilbert, y si la dimensión es finita, se dirá que es un espacio euclídeo.
Todo producto escalar induce una norma sobre el espacio en el que está definido, de la siguiente manera:

 A • B = |A| |B| cos(θ).
A • B = |A| |B| cos(θ).
|A| cos(θ) es la proyección escalar de A en B.El producto escalar de dos vectores en un espacio euclídeo se define como el producto de sus módulos por el coseno del ángulo θ que forman.

Esta definición de carácter geométrico es independiente del sistema de coordenadas elegido y por lo tanto de la base del espacio vectorial escogida.
Cuando dos vectores forman un ángulo cero, el valor del coseno es la unidad, por lo tanto el producto de los módulos vale lo mismo que el producto escalar.
 formada por los vectores unitarios {i , j , k} tenemos:
formada por los vectores unitarios {i , j , k} tenemos:
Se calcula a través del producto interno del vector consigo mismo.
formada por los vectores unitarios {i, j, k}
Contenido |
Definición general
El producto interior o producto escalar de dos vectores en un espacio vectorial es una forma sesquilineal, hermítica y definida positiva, por lo que se puede considerar una forma cuadrática definida positiva.Un producto escalar se puede expresar como una aplicación
donde V es un espacio vectorial y es el cuerpo sobre el que está definido V. debe satisfacer las siguientes condiciones:- Linealidad por la izquierda:
 , y linealidad conjugada por la derecha:
, y linealidad conjugada por la derecha: 
- Hermiticidad:
 ,
, - Definida positiva:
 , y
, y  si y sólo si x = 0,
si y sólo si x = 0,
son vectores de V, representan escalares del cuerpo y es el conjugado del complejo c.Si el cuerpo tiene parte imaginaria nula (v.g.,
), la propiedad de ser sesquilineal se convierte en ser bilineal y el ser hermítica se convierte en ser simétrica.También suele representarse por
o por .Un espacio vectorial sobre el cuerpo
o dotado de un producto escalar se denomina espacio prehilbert o espacio prehilbertiano. Si además es completo, se dice que es un espacio de hilbert, y si la dimensión es finita, se dirá que es un espacio euclídeo.Todo producto escalar induce una norma sobre el espacio en el que está definido, de la siguiente manera:
.
Definición geométrica del producto escalar en un espacio euclídeo real

|A| cos(θ) es la proyección escalar de A en B.
En los espacios euclídeos, la notación usual de producto escalar es

Esta definición de carácter geométrico es independiente del sistema de coordenadas elegido y por lo tanto de la base del espacio vectorial escogida.
Proyección de un vector sobre otro
Puesto que A cos θ representa el módulo de la proyección del vector A sobre la dirección del vector B, esto es A cos θ = proy AB, seráde modo que el producto escalar de dos vectores también puede definirse como el producto del módulo de uno de ellos por la proyección del otro sobre él.

Ángulos entre dos vectores
La expresión geométrica del producto escalar permite calcular el coseno del ángulo existente entre los vectores:
[Vectores ortogonales
Dos vectores son ortogonales o perpendiculares cuando forman ángulo recto entre sí. Si el producto escalar de dos vectores es cero, ambos vectores son ortogonales.ya que el valor del coseno de 90º es cero.

Vectores paralelos o en una misma dirección
Dos vectores son paralelos o llevan la misma dirección si el ángulo que forman es de 0 grados o de 180 grados.Cuando dos vectores forman un ángulo cero, el valor del coseno es la unidad, por lo tanto el producto de los módulos vale lo mismo que el producto escalar.

Propiedades del producto escalar
1. Conmutativa:2. Distributiva respecto a la suma vectorial:

3. Asociativa respecto al producto por un escalar m:


Expresión analítica del producto escalar
Si los vectores A y B se expresan en función de sus componentes cartesianas rectangulares, tomando la base canónica en formada por los vectores unitarios {i , j , k} tenemos:
El producto escalar se realiza como un producto matricial de la siguiente forma:


[ Norma o Módulo de un vector
Se define como la longitud del segmento orientado (vector) en el espacio métrico considerado.Se calcula a través del producto interno del vector consigo mismo.
Efectuado el producto escalar, tenemos:

de modo que

Por componentes, tomando la base canónica en
 formada por los vectores unitarios {i, j, k}
formada por los vectores unitarios {i, j, k}de modo que


Producto Cruz
En álgebra lineal, el producto vectorial es una operación binaria entre dos vectores de un espacio euclídeo tridimensional que da como resultado un vector ortogonal a los dos vectores originales. Con frecuencia se lo denomina también producto cruz (pues se lo denota mediante el símbolo ×) o producto externo (pues está relacionado con el producto exterior).
Contenido |
Definición

 y
y  en el espacio vectorial . El producto vectorial entre
en el espacio vectorial . El producto vectorial entre  y
y  da como resultado un nuevo vector,
da como resultado un nuevo vector,  . Para definir este nuevo vector es necesario especificar su módulo y dirección:
. Para definir este nuevo vector es necesario especificar su módulo y dirección:- El módulo de está dado por

- La dirección del vector c, que es ortogonal a a y ortogonal a b, está dada por la regla de la mano derecha.
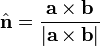
El producto vectorial puede definirse de una manera más compacta de la siguiente manera:
donde

 es el vector unitario y ortogonal a los vectores a y b y su dirección está dada por la regla de la mano derecha y θ es, como antes, el ángulo entre a y b. A la regla de la mano derecha se la llama a menudo también regla del sacacorcho.
es el vector unitario y ortogonal a los vectores a y b y su dirección está dada por la regla de la mano derecha y θ es, como antes, el ángulo entre a y b. A la regla de la mano derecha se la llama a menudo también regla del sacacorcho.] Producto vectorial de dos vectores

 y
y  dos vectores concurrentes de , el espacio afín tridimensional según la base anterior.
dos vectores concurrentes de , el espacio afín tridimensional según la base anterior.Se define el producto
 , y se escribe
, y se escribe  , como el vector:
, como el vector:En el que

 , es el determinante de orden 2.
, es el determinante de orden 2.
Que da origen a la llamada regla de la mano derecha o regla del sacacorchos: girando el primer vector hacia el segundo por el ángulo más pequeño, la dirección de
 es el de un sacacorchos que gire en la misma dirección.
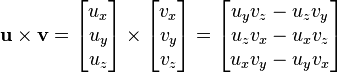
es el de un sacacorchos que gire en la misma dirección.La siguiente expresión, aunque carece de significado matemático estricto, sirve de método nemónico para recordar el orden de las coordenadas en el producto:[cita requerida]
Ejemplo
El producto vectorial de los vectores y
y  se calcula del siguiente modo:
se calcula del siguiente modo:Expandiendo el determinante:

Puede verificarse fácilmente que

{kind=link}
{kind=link}
{kind=link}
{kind=link}
 es ortogonal a los vectores y efectuando el producto escalar y verificando que éste es nulo (condición de perpendicularidad de vectores).
es ortogonal a los vectores y efectuando el producto escalar y verificando que éste es nulo (condición de perpendicularidad de vectores).Propiedades
Cualesquiera que sean los vectores, y  :
: , (anticonmutatividad)
, (anticonmutatividad) - Si
 con
con  y
y  ,
,  ; esto es, la anulación del producto vectorial proporciona la condición de paralelismo entre dos direcciones.
; esto es, la anulación del producto vectorial proporciona la condición de paralelismo entre dos direcciones.  .
.  , conocida como regla de la expulsión.
, conocida como regla de la expulsión.  , conocida como identidad de Jacobi.
, conocida como identidad de Jacobi.  , en la expresión del término de la derecha, sería el módulo de los vectores a y b, siendo θ ,el ángulo menor entre los vectores y ; esta expresión relaciona al producto vectorial con el área del paralelogramo que definen ambos vectores.
, en la expresión del término de la derecha, sería el módulo de los vectores a y b, siendo θ ,el ángulo menor entre los vectores y ; esta expresión relaciona al producto vectorial con el área del paralelogramo que definen ambos vectores. - El vector unitario
 es normal al plano que contiene a los vectores y .
es normal al plano que contiene a los vectores y .
No hay comentarios:
Publicar un comentario